{kind=link}
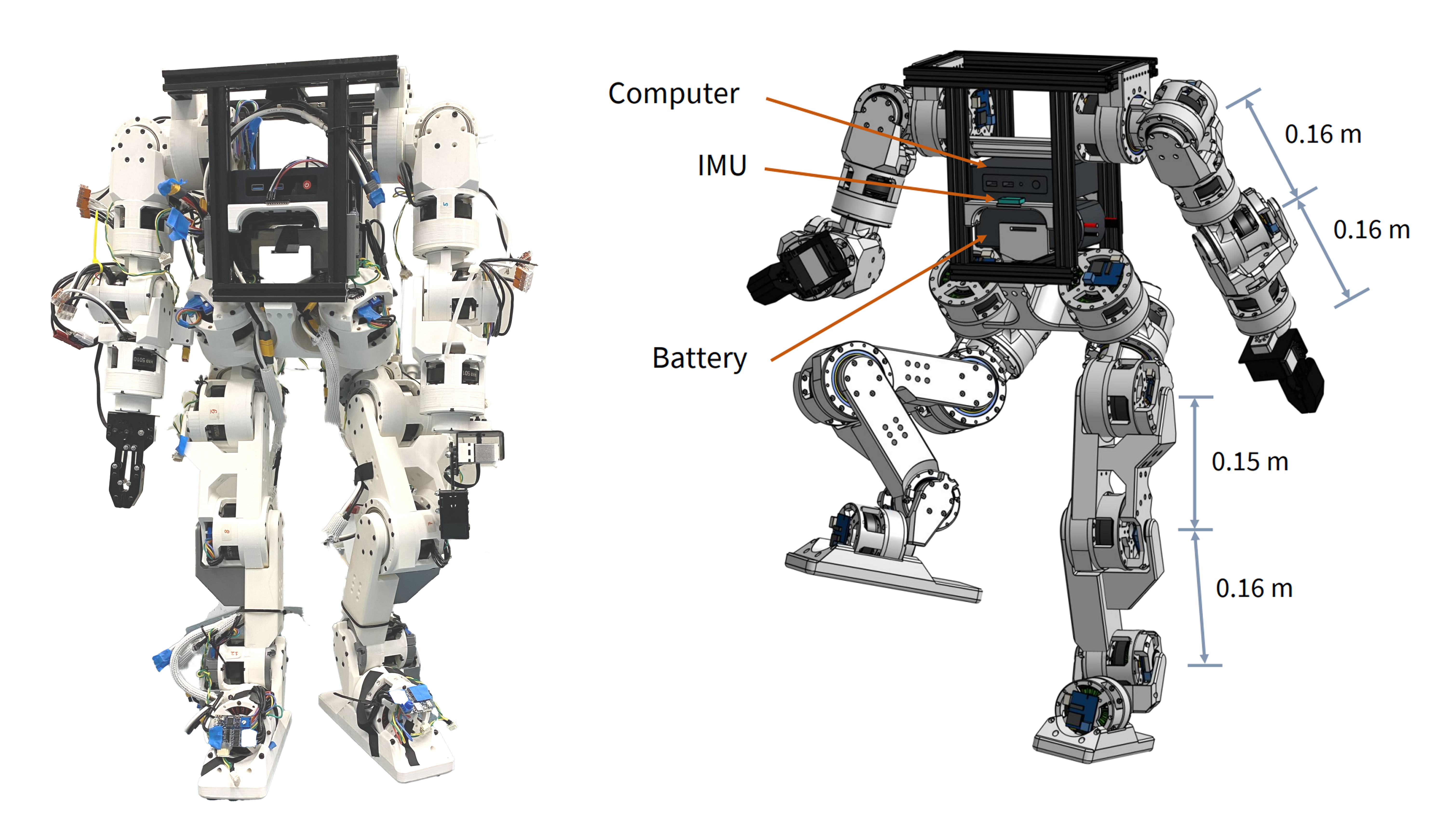
Калифорнийский университет в Беркли опубликовал проект Berkeley Humanoid Lite, ставший итогом исследований и экспериментов в области создания простых для изготовления человекоподобных роботов. Робот построен с использование открытого программного обеспечения и развивается в соответствии с концепцией Open Hardware. Аппаратная начинка сформирована из типовые компонентов, имеющихся в свободной продаже, и деталей, изготовленных на 3D-принтере. Опубликованы модели машинного обучения, исходный код ПО, схемы, список компонентов (BOM), сборочный план и модели для 3D-печати.
Под лицензией MIT открыты исходные тексты выполняемых на стороне робота прошивок контроллеров актуаторов и управляющей низкоуровневой начинки, а также внешние компоненты, такие как среда для разработки управляющих сценариев, окружение для симуляции, тренировки моделей движения и верификации, построенное на базе фреймворков Isaac Lab, Isaac Sim и MuJoCo. Для дистанционного управления могут использоваться типовые контроллеры виртуальной реальности SteamVR.
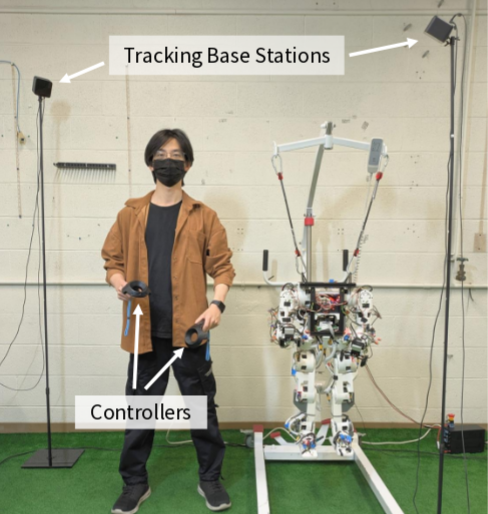
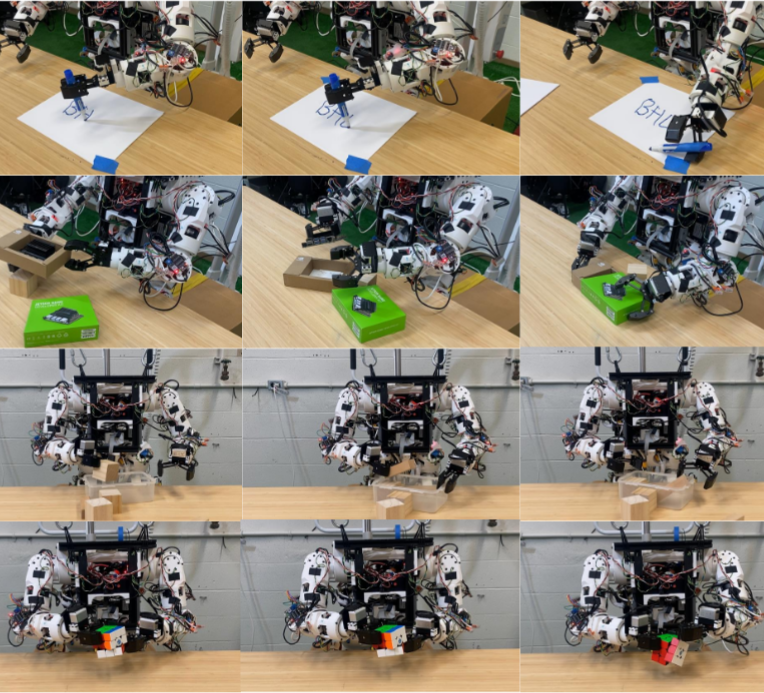
Отдельно опубликованы используемые в экспериментах модели машинного обучения, а также предложен контроллер локомоции (locomotion controller), использующий модель машинного обучения с подкреплением для обеспечения перемещения робота в заданную точку. Продемонстрировано использование робота в качестве манипулятора, дистанционно управляемого человеком. Ведутся эксперименты в области автономной навигации, обхода препятствий, воспроизведения мелкой моторики и координации движений при прямохождении.
Проект может быть использован другими исследователями в качестве недорогой отправной точки для изучения и проведения исследований в области робототехники. Для сборки не требуются особые навыки и при желании любой может воспользоваться предлагаемыми инструкциями и схемами для создания своего экземпляра, затратив менее 5000 долларов. Робот модульный и рассчитан на возможность доработки и адаптации для своих целей, например, после минимальной модификации может быть преобразован из прямоходящего в четвероногого или кенавроподобного.


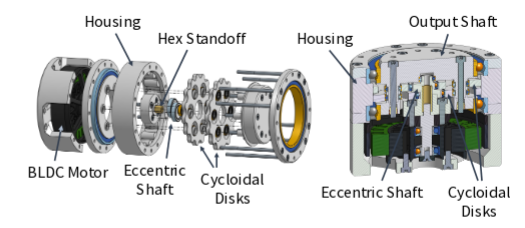
Основным фактором удешевления производства стало использование в конструкции пластиковый деталей, изготовленных на 3D-принтере. При этом исследователям пришлось решить ряд проблем, связанных с надёжностью и долговечностью работы трансмиссий на базе пластиковых, а не металлических шестерёнок. Ограничения удалось преодолеть благодаря задействованию циклоидного редуктора.